How many co-ordinate systems available in Fanuc Robots ?
Answered Co-ordinates System
Didn't find what you were looking for?
New post

-
 Comment actions
Comment actions
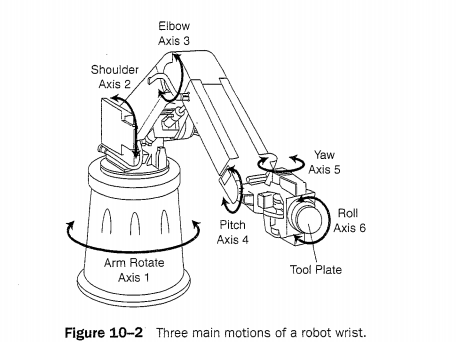
JOINT FRAME C. S.
JOINT coordinate system is coordinate system of individual axis. Each axis rotates around its rotation center. JOINT c.s. is predetermined and cannot be changed.

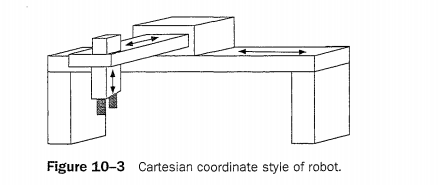
CARTESIAN C. S
The robot position in Cartesian c.s. is described with position coordinates x,y, z and rotations w, p, r.

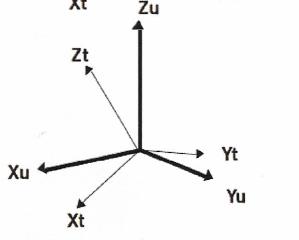
WORLD C. S. AND TOOL C. S.
The world coordinate system is predetermined and cannot be changed. Based on WORLD c.s. USER AND JOG c.s. are defined. The c.c.s. origin is in the center of the
second axis. Tool c.s. defines position of the tool center (TCP- tool center point) with respect to the flange center.
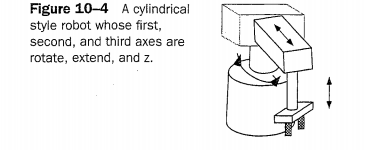
USER C. S. AND JOG C. S.
USER c.s. is set manually by the user. 9 coordinate systems is predetermined. In USER coordinate system the origin and rotation are set according to the world
coordinate system.
JOG c.s. is used for easier manual robot movement in manual regime.
If the TOOL or USER coordinate systems are changed, the toolpath has to be preprogrammed otherwise tool collision may occur.TOOL FRAME- TOOL C. S.
TOOL frame is Cartesian coordinate system, which defines tool center point (TCP) and tool direction (which is normally z axis). The center point of the flange in 6th
axis is default TCP.
TCP must be moved to the tool origin, which is specified by its geometry. The user defined TCP is a relative distance and orientation in respect to the default TCP.
-
 Comment actions
Comment actions
Dear Braylen Mcconnel
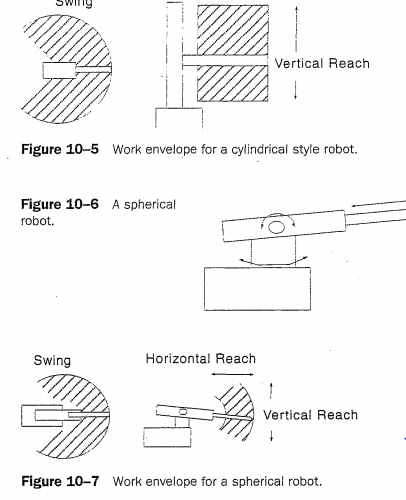
There are a total of 9 coordinate system available in FANUC robotics. Attached are few snapshots from the document which I have. This information is in Chapter # 10 of the book "Industrial Automation and Process Control" written by Stenerson J. in 2003, Upper saddle river, NJ Prentice Hall.In case if you need the detailed document, then please let me know as I would provide it to you. Thank You



-
Please sign in to leave a comment.
Comments
3 comments